Почему не падает велосипед. Если у велосипеда плохой накат. Велосипед не падает из-за центробежной силы
Считается, что в сохранении баланса велосипеда важнейшую роль играют два механизма. Первый - автоматическое подруливание: если велосипед наклоняется в какую-то сторону, переднее колесо само поворачивается туда же; начинает поворачивать весь велосипед, и центробежная сила возвращает колесо в начальное положение. Оно также возвращается и при езде по прямой, после случайного отклонения в сторону. Такое подруливание связано с конструкцией передней вилки, оси вращения руля: если мысленно продолжить ее вниз, то она пересечется с поверхностью земли перед точкой, в которой ее касается само колесо - между ними появляется угол (кастор), оказывающий стабилизирующий эффект и при возникновении направленных в сторону сил колесо стремится вернуться в исходное положение. Второй механизм связывают с гироскопическим моментом вращающихся колес.
Все довольно просто - однако американский инженер Энди Руина (Andy Ruina) с коллегами взялись опровергнуть оба утверждения. Они сконструировали велосипед, в котором эффекты и того, и другого механизма нивелированы. В отличие от всех «настоящих» велосипедов, у этого переднее колесо касается опоры перед точкой пересечения с нею оси передней вилки, что «отменяет» действие кастора. А кроме того, и переднее, и заднее колеса связаны с двумя другими, вращающимися в обратную сторону и тем самым обнуляющими гироскопический эффект.
Конечно, внешне вся эта машинка напоминает скорее какой-нибудь кастом-байк (читайте о них: «Не спеша«) или даже самокат, а не традиционный велосипед: колеса маленькие, седла нет… Но тем не менее, конструкционно это, все-таки, велосипед, с которым можно экспериментировать. Взять и подтолкнуть - и посмотреть, как быстро он упадет на бок! Как ни удивительно - не так уж и быстро; по сути, равновесие он держит не хуже обычного велосипеда, он даже демонстрирует то же автоматическое подруливание.
По результатам эксперимента авторы делают однозначный вывод: оба эффекта - и кастора, и гироскопа - играют важную роль в сохранении баланса едущего велосипеда, но оба они не являются критически важными для него. Заметим, что конструкции велосипедов без гироскопического момента уже тестировались ранее, но опровержение важнейшей роли кастора в сохранении баланса велосипеда проделано впервые, и весьма наглядно.
Так отчего же велосипед не падает? Видимо, ключевую роль в этом играет особое распределение нагрузки: центр массы в передней части расположен существенно ниже, чем в задней. В результате переднее колесо заваливается быстрее заднего, а поскольку они жестко связаны по вертикальной оси, переднее колесо вместо того, чтобы просто наклониться набок, разворачивается в ту же сторону, выправляя положение велосипеда.
Для того, чтобы двухколесный велосипед не упал, нужно постоянно поддерживать равновесие. Поскольку площадь опоры велосипеда очень мала (в случае двухколесного велосипеда это всего лишь прямая, проведённая через две точки, в которых колеса касаются земли), такой велосипед может находиться только в динамическом равновесии. Это достигается с помощью подруливания: если велосипед наклоняется, велосипедист отклоняет руль в ту же сторону. В результате велосипед начинает поворачивать и центробежная сила возвращает велосипед в вертикальное положение. Этот процесс происходит непрерывно, поэтому двухколесный велосипед не может ехать строго прямо; если руль закрепить, велосипед обязательно упадёт. Чем выше скорость, тем больше центробежная сила и тем меньше нужно отклонять руль, чтобы поддерживать равновесие.
При повороте нужно наклонить велосипед в сторону поворота так, чтобы сумма силы тяжести и центробежной силы проходила через линию опоры. В противном случае центробежная сила опрокинет велосипед в противоположную сторону. Как и при движении по прямой, идеально сохранять такой наклон невозможно, и подруливание осуществляется точно так же, только положение динамического равновесия смещается с учётом возникшей центробежной силы. Конструкция рулевого управления велосипеда облегчает поддержание равновесия. Ось вращения руля расположена не вертикально, а наклонена назад. Кроме того, она проходит ниже оси вращения переднего колеса и впереди той точки, где колесо касается земли.
Благодаря такой конструкции достигаются две цели:
При случайном отклонении переднего колеса от нейтрального положения возникает момент силы трения относительно рулевой оси, который возвращает колесо обратно в нейтральное положение.
Если наклонить велосипед, возникает момент силы, поворачивающий переднее колесо в сторону наклона. Этот момент вызван силой реакции опоры. Она приложена к точке, в которой колесо касается земли и направлена вверх. Из-за того, что рулевая ось не проходит через эту точку, при наклоне велосипеда сила реакции опоры смещается относительно рулевой оси.
Таким образом, осуществляется автоматическое подруливание, помогающее поддерживать равновесие. Если велосипед случайно наклоняется, то переднее колесо поворачивается в ту же сторону, велосипед начинает поворачивать, центробежная сила возвращает его в вертикальное положение, а сила трения возвращает переднее колесо обратно в нейтральное положение. Благодаря этому, можно ехать на велосипеде «без рук». Велосипед сам поддерживает равновесие. Сместив центр тяжести в сторону, можно поддерживать постоянный наклон велосипеда и выполнить поворот.
Можно заметить, что способность велосипеда самостоятельно сохранять динамическое равновесие зависит от конструкции рулевой вилки. Определяющим является плечо реакции опоры колеса, то есть длина перпендикуляра, опущенного из точки касания колеса земли на ось вращения вилки; или, что эквивалентно, но проще измерить - расстояние от точки касания колеса до точки пересечения оси вращения вилки с землёй. Таким образом, для одного и того же колеса возникающий момент будет тем выше, чем больше наклон оси вращения вилки. Однако для достижения оптимальных динамических характеристик нужен не максимальный момент, а строго определенный: если слишком малый момент приведёт к трудности удержания равновесия, то слишком большой - к колебательной неустойчивости, в частности - «шимми» (см. ниже). Поэтому положение оси колеса относительно оси вилки тщательно выбирается при проектировании; многие велосипедные вилки имеют изгиб или просто смещение оси колеса вперёд для снижения избыточного компенсирующего момента.
Распространённое мнение о существенном влиянии гироскопического момента вращающихся колёс на поддержание равновесия является неправильным. На высоких скоростях (начиная примерно с 30 км/час) переднее колесо может испытывать т. н. скоростные виляния (speed wobbles), или «шимми» - явление, хорошо известное в авиации. При этом явлении колесо самопроизвольно виляет вправо и влево. Скоростные виляния наиболее опасны при езде «без рук» (то есть когда велосипедист едет, не держась за руль). Причина скоростных виляний - не в плохой сборке или слабом креплении переднего колеса, они вызваны резонансом. Скоростные виляния легко погасить, снизив скорость или изменив позу, но если этого не сделать, они могут быть смертельно опасными.
Езда на велосипеде эффективнее (по затратам энергии на километр) как ходьбы, так и езде на автомобиле. При езде на велосипеде со скоростью 30 км/ч сжигается 15 ккал/км (килокалорий на километр), или 450 ккал/ч (килокалорий в час). При ходьбе со скоростью 5 км/ч сжигается 60 ккал/км или 300 ккал/ч, то есть езда на велосипеде в четыре раза эффективнее ходьбы по затратам энергии на единицу расстояния. Поскольку при езде на велосипеде расходуется больше калорий в час, она также является лучшей спортивной нагрузкой. (При беге затраты калорий в час ещё выше, но вибрация травмирует колени и голеностопный сустав). Тренированный мужчина, не являющийся профессиональным спортсменом, может в течение длительного времени развивать мощность 250 ватт, или 1/3 л.с. Это соответствует скорости 30-50 км/час по ровной дороге. Женщина может развивать меньшую мощность, но большую мощность на единицу веса. Поскольку на ровной дороге почти вся мощность расходуется на преодоление сопротивления воздуха, а при езде в гору основные затраты - на преодоление силы тяжести, женщины, при прочих равных условиях, едут медленнее по ровному месту и быстрее в гору.
На велосипедах начального уровня устанавливают трансмиссию самых дешевых групп, и когда передачи начинают плохо переключаться и заедать, то владельцы лишь разводят руками — что, мол, возьмешь с дешевого хлама.
Большое удивление постигает тех, кто покупает значительно более дорогой байк, и через некоторое время опять сталкивается с проблемами переключения. Дело здесь, разумеется, не в карме, а в неправильном отношении к технике.
Я ни в коем случае не заявляю, что между начальными и топовыми компонентами нет разницы. Разумеется, опытный велосипедист с закрытыми глазами отличит работу Shimano Alivio от XTR по трем щелчкам.
Причины нечеткой работы переключателей передач
Тросики и рубашки . Это самая распространенная проблема, особенно у начинающих велосипедистов. Я просто удивляюсь, в каком ужасном состоянии они находятся у некоторых велолюбителей.
Осмотрите участки тросиков, которые не скрыты рубашкой, пощелкайте манеткой, чтобы обнажилась скрытая часть. Не должно быть никаких задранностей или вылезших нитей. Если такие дефекты присутствуют, то выбрасывайте и тросы, и рубашки сразу, и идите в магазин за новыми.
На конце троса обязательно должен быть алюминиевый колпачок, который предохраняет его от распушения. Пассатижами можно его аккуратно снять и открутить болт, крепящий тросик к заднему переключателю.
Освобождайте рубашку из упоров, аккуратно снимая её с троса. Сам трос можно оставить в его гнезде в манетке. Когда он полностью обнажен, еще раз осмотрите на предмет задравшихся нитей и потертостей. Брызните на тряпку WD40 и тщательно протрите его.
Рубашки, если они в порядке, вполне можно также использовать по второму разу. Залейте в них побольше WD40, и аккуратно пошуруйте там тросом. Задача — выгнать всю грязь, которая скопилась за период катания.
Здесь прошу учесть такую вещь — тросы и рубашки не нуждаются в смазке. Ни в коем случае на смазывайте их густыми смазками, типа солидола. Буквально через несколько выездов по грунту у вас в рубашках будет консистенция, состоящая с основном из грязи.
Если нужно успокоить душу, то брызните тефлоновым спреем, он быстро высохнет, но оставит тонкий скользящий слой. Который, впрочем, сотрется через десяток переключений. 🙂
Еще один момент. Существуют тросики с тефлоновым покрытием, например, Shimano XTR Cable, стоящие весьма немалых денег. Я во времена фетишизма только такими и пользовался, из-за скользящего покрытия усилие на манетке немного меньше.
К сожалению, примерно за год активного катания тефлон в местах трения стирается начисто. Однако у этих тросов есть очень большое преимущество — в комплекте к ним идут упоры-носики, которые эффективно предохраняют от попадания грязи.
Возвращаясь к рубашкам, проследите, чтобы нигде не было слишком длинных, или наоборот, коротких отрезков, из-за этого в местах изгиба будет повышенное трение, и рано или поздно там скопится грязь.
Гнутый петух. Если вы не знаете, что это за деталь, то здесь можете прочитать заметку про . Иногда бывает, что вроде бы идеально настроенный задний переключатель работает нечетко, несмотря на свежие тросики и рубашки.
Причина может быть в том, что при транспортировке велосипед где-то зажало, и петух чуть-чуть погнуло. Если вы не можете добиться четкого переключения скоростей, то снимите петух и положите его на стол.

Если он немного кривой, то нужно выгибать. Не перестарайтесь, алюминий может дать микротрещины. Как именно его гнуть — не буду советовать. Я это делаю кустарным способом — ставлю на велосипед и тяну руками. В идеале — нужно править специальной машинкой, которая учитывает даже асимметричность дропаутов.
Люфт заднего переключателя. Подвигайте задний переключатель на себя-от себя, держась там, куда входит трос. В идеале люфта не должно быть вообще, но небольшой свободный ход не представляет собой ничего криминального, особенно на начальных группах трансмиссии.

В процессе эксплуатации этот люфт имеет свойство увеличиваться, и тогда начинаются задержки в переключении, нечеткость и тд. Если с тросами и петухом всё в порядке, то при точной настройки можно побороть негативный эффект люфта.
__________________________________
Чаще всего, причина того, что на велосипеде плохо переключаются передачи в комплексе проблем. Грязь в рубашках, немного гнутый петух, небольшой люфт переклюка, плохая настройка — все допуски складываются.
Причем, многие катальцы ездят так, и находят нормальным, когда скорости переключаются по принципу три вперед, две назад. Ребята, это ненормально!
Любая трансмиссия, будь это даже самая низкая Shimano Tourney, должна работать четко. Не привыкайте к плохому, иначе даже купив дорогой байк, через сезон-другой получите тоже самое.
Купить троса, переключатели и прочие компоненты по самой выгодной цене можно в лучших онлайн веломагазинах
Почему велосипед не падает, не вполне понятно, особенно на первый взгляд. Площадь его опоры очень мала, даже если весьма широкие и слабо накачаны. Поставленный вертикально, он долго не простоит. Обычно он падает на бок через 2 - 4 секунды, но если его удачно толкнуть вперед, падение случится через 10 - 15 секунд. Именно этим решительно отличается от и четырехколесного автомобиля. Даже если отбросить влияние велосипедиста на устойчивость, то во время езды велосипед гораздо устойчивей, чем во время остановки. Управляться он может также по-разному, и не только поворотом . Если вспомнить езду «без рук», то становится понятно, что факторов, обеспечивающих устойчивость велосипеда, несколько. Рассмотрим главные. Но прежде, еще одно короткое замечание: у велосипеда существуют две устойчивости и одна управляемость. Первая устойчивость — это вертикальная, вторая — продольная, или курсовая устойчивость, а управляемость — только продольная (курсовая). Само собой, чем лучше продольная устойчивость, тем хуже управляемость, и наоборот. Сложность заключается во взаимосвязи этих трех важных параметров. Один влияет на другой, другой на третий и рассказать, положим, о вертикальной устойчивости, не упоминая продольную, затруднительно. Но в любом случае, каждому практикующему велосипедисту важно сохранить равновесие, или баланс и катить в правильном направлении.
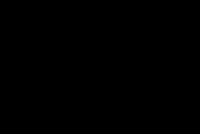
Равновесию на малой скорости или даже стоя на месте, как лихо демонстрируют некоторые умельцы, помогает геометрия вилки и рулевой колонки. Поворачивая руль, мы сдвигаем центральную линию велосипеда, проходящую через точки контакта с поверхностью переднего и заднего колес. Так мы подстраиваем ее под слегка сдвинувшийся в сторону центр тяжести велосипедиста и его верного двухколесного коня. Балансирование на месте всем хорошо известно и знакомо — это сюрпляс. Подробно о полезных свойствах вилок и их влиянии на устойчивость можно посмотреть чуть ниже.
Вид сверху показывает, как эту линию шин можно сдвинуть в сторону поворачиванием руля из стороны в сторону. Это очень важно для баланса на низкой скорости.
- Ось поворота на уровне земли
- Линия через пятна контакта шин
- Центральная линия

- Вылет
- Боковая сила из-за угла скольжения
- Наклон
- Пятно контакта шины с дорогой
- Отклонённое колесо

- 1/2 дюйма
- Ось рулевой колонки на уровне земли
- Передний вылет
- 7 - 10 грудусов
- Задний вылет
- 1/2 градуса
- Линия движения
Какую скорость считать малой, а какую — большой? Это нетривиальный вопрос. Но все-таки можно получить приблизительную оценку минимальной скорости устойчивого движения велосипеда. Помогает этому теория движения твердого диска (обруча, колеса) по плоскости без проскальзывания. Согласно ней, для обеспечения устойчивости такого диска, близкого к диаметру велосипедного колеса, достаточно скорости около 1 м/сек, или 3,6 км/час.
Скорость ниже минимальной — это уже искусство балансирования, или сюрпляс на треке. Система, составленная из велосипеда и велосипедиста, конечно, очень далека от простого катящегося диска или обруча, но данное значение показывает порядок величины минимальной скорости, необходимой, чтобы устойчиво держаться на велосипеде. И, как каждому хорошо известно, имеет приближенное согласие с повседневным опытом.
Но ведь велосипед — это вам не какой-нибудь «Харлей». Велосипедист весит гораздо больше, чем велосипед, на котором он сидит. Поэтому чтобы в некоторых ситуациях, например, на узкой колее, тропинке, лыжне можно перемещать центр тяжести как вправо, так и влево, меняя положение тела велосипедиста относительно велосипеда. Нужно, как бы отталкиваясь от него в сторону, противоположную первоначальному отклонению, сохранять равновесие, продолжая неуклонное движение вперед. При этом более высокий центр тяжести велосипедиста сильнее воздействует на общий баланс системы велосипедист - велосипед и дает больший контроль над положением и движением велосипеда. Еще один полезный способ движения корпусом при рулении рассмотрим ниже.

Представим себе обычный случай: велосипедист поворачивает со скоростью v по кругу с радиусом R. Для сохранения равновесия велосипедист должен наклониться на угол α от вертикали или, что тоже самое, на угол φ=90° - α от горизонтали, чтобы компенсировать центробежную силу (смотрите рисунок выше). Условия равенства сил приводят к известной еще со школы элементарной формуле ctg α=(v 2 /gR)=tgφ≤μ (1), где μ — максимально возможный в данный момент коэффициент сцепления шины с дорогой. Для реальной оценки его надо уменьшать на 20 - 25% по сравнению с многочисленными табличными значениями, g — ускорение свободного падения, равное 9,81 м/сек. Велосипедист поворачивает благодаря силам трения между дорогой и передним колесом. Если дорога скользкая или покрыта льдом, то контролируемый поворот становится затруднительным или невозможным. Вместо поворота может произойти переднего колеса, потеря равновесия и падение.

Пусть теперь велосипедист, спокойно катясь по прямой, ровной и гладкой дороге и любуясь проплывающим мимо пейзажем, случайно отклонился от вертикали на небольшой угол α l . Чтобы не упасть, велосипедист старается повернуть руль в сторону наклона велосипеда на угол β. Спрашивается, на какой угол надо повернуть руль, дабы не упасть? Для ответа достаточно посмотреть на рисунок выше и вспомнить любимую теорему синусов G=2R 2 sinβ (2), где G — расстояние между осями колес (база велосипеда), R 2 — радиус, по которому начинает двигаться велосипед после поворота переднего колеса. Он должен быть меньше, чем радиус, по которому спокойно и уверенно поворачивает велосипедист, отклонившись от вертикали на угол α l , согласно формуле (1). Иначе выправить равновесие не удастся. Теперь подставим формулу (2) в формулу (1). И получим: sin β=(gGtgαl/2v 2) (3). Эта очень простая формула может рассказать много полезного.
Первое. Велосипедисту, катящемуся со скоростью v и отклонившемуся от вертикали на угол α l , нужно повернуть руль на угол больший или равный углу β, который легко подсчитать по формуле (3).
Второе. Чем больше скорость велосипедиста, тем на меньший угол надо повернуть руль и для восстановления равновесия и для прохождения виража. Из этого следует, что велосипедом намного легче управлять на высокой скорости, чем на маленькой. И это хорошо известно всем, кто садился на велосипед.
Третье. Чем больше база велосипеда — G, тем на больший угол надо поворачивать руль, дабы восстановить равновесие или вписаться в поворот. И так же интуитивно ясно, что по узким, лесным извилистым дорожкам легче катить на велосипеде с малой базой.
Четвертое. Навык правильного поворота руля быстро становится автоматическим, подсознательным, и многие велосипедисты не подозревают, что даже при беззаботной езде по прямой им нужно постоянно поворачивать руль. Достаточно посмотреть на след, оставленный колесами велосипеда. Легко увидеть, что относительно прямая колея, оставленная задним колесом, всё время пересекается извилистым следом переднего. А это значит, что переднее колесо во время движения постоянно поворачивает из стороны в сторону, велосипед все время «въезжает» под регулярно падающего велосипедиста и, благодаря этому, сохраняет равновесие.
И, наконец, пятое. Если руль не поворачивается, если рулевая колонка, положим, по каким-то причинам заклинена, ездить практически нельзя (в современном понимании этого слова). Двухколесные самокаты начала XIX века, не имевшие рулевого управления, могли катить только по прямой.
И это приводит нас к любопытной аналогии между сохранением равновесия на велосипеде и удержанием швабры, бильярдного кия или авторучки («Паркер» с золотым пером, например) на раскрытой ладони. Действительно, как удержать кий? Сначала он стоит на ладони вертикально, а затем начинает отклоняться, и ладонь быстро перемещается в сторону наклона. Опора кия смещается, и он начинает наклоняться в другую сторону. Ладонь снова перемещается, и такое балансирование может длиться весьма долго.

То же самое делает и велосипедист. Но возникает естественный вопрос: чем проще балансировать — шваброй или авторучкой? Ответ не вполне очевиден, но, твердо освоив школьный курс на «хорошо», получить правильный результат несложно. Прежде всего, на что похожи стоящая швабра, авторучка и катящийся велосипед? Правильно! На перевернутый физический маятник. Вместо точки подвеса есть точка опоры. И такие перевернутые маятники всем хорошо знакомы — например, механический метроном, которым задают ритм при изучении музыки. Чем выше поднимают грузик на планке, тем больше период колебаний, и тем медленнее качается маятник метронома. А если грузик опустить вниз, к точке опоры, то период колебаний уменьшится, и маятник быстро-быстро зачастит.
С некоторыми оговорками и при малых отклонениях от вертикали его можно рассмотреть как математический маятник и написать крайне простую формулу для периода колебаний. T≈2π√l/g , где l — расстояние от точки опоры до центра масс (ЦМ). Время отклонения от вертикали на малый угол α1 равно: t=T/4≈(π/2)√l/g . Оно не зависит от массы швабры и «откормленности» велосипедиста. Прикинем: швабра имеет l=1м, 1=1,6*0,32=0,5 с. У авторучки же l=0,1 м, t= 1,6*0,1=0,16 с. А высокий велосипед — l=1,2 метра, t= 1,6*0,35=0,56 с. Результат прост и нагляден.
Точно так ведет себя и любой предмет: чем он выше, чем больше расстояние от точки опоры до центра масс (центра тяжести), тем медленнее он отклоняется от вертикали на малый угол, и тем легче им балансировать или удерживать на нем равновесие. И тут вне конкуренции велосипед «Паук», у которого центр масс располагался на высоте около двух метров. Но падать с такой высоты было больно и опасно, и «Пауки» не выжили. Поэтому намозолившее глаза выражение «низкий устойчивый силуэт» справедливо только для трех или четырех колесных экипажей. Если так говорят о двухколесных велосипедах или мотоциклах, то это нонсенс и техническая безграмотность.
Об окружающем мире современной науке известно практически все, однако до сих пор некоторые явления и вещи не имеют рационального объяснения. Мы сделали подборку из таких необъяснимых феноменов, нарочно взяв разные области знания.
Эффект Мпембы (физика)
Парадоксально, но горячая вода замерзает быстрее, чем холодная, поэтому катки заливают горячей водой. В физике этот феномен называется «эффектом Мпембы». Почему? Потому что в 1963 году школьник из Танганьики озадачил своего учителя вопросом о том, почему разогретая жидкость замерзает быстрее, чем холодная. Педагог отмахнулся от навязчивого школьника, сказав, что это «не всемирная физика, а физика Мпембы».
Эрасто о своем вопросе не забыл и позже спросил об этом же приехавшего с лекциями в университет Дар-эс-Салам английского физика Дениса Осборна. В отличие от школьного учителя, Осборн не только не стал смеяться над пытливым студентом, но провел вместе с ним ряд опытов, а в 1969 году совместно с Эрасто опубликовал статью в журнале Physics Education, где этот феномен и был назван «эффектом Мпембы», хотя над ним размышляли когда-то и Аристотель, и Фрэнсис Бэкон .
Wow-сигнал (астрофизика)
15 августа 1977 года доктором Джерри Эйманом во время работы на радиотелескопе «Большое ухо» в рамках проекта SETI был зафиксирован сильный узкополосный космический радиосигнал. Его характеристики, такие как полоса передачи и соотношение сигнала и шума соответствовали сигналу внеземного происхождения. Тогда Эйман обвёл соответствующие ему символы на распечатке и подписал на полях «Wow!».
Радиосигнал исходил из области неба в созвездии Стрельца, примерно в 2.5 градусах к югу от звёздной группы Хи. Эйман ожидал повторный сигнал, но его так и не последовало.
Первая проблема WOW-сигнала в том, что для его отправки (если все же принять как гипотезу его внеземное происхождение) требуется очень мощный передатчик - минимум 2, 2 гигаватт. До сих пор самый мощный передатчик на Земле имеет мощность 3600 кВт.
По поводу происхождения этого загадочного послания есть масса гипотез, но ни одна из не является признанной.
В 2012 году, к 35-летию WOW-сигнала обсерватория Аресибо отправила ответ из 10 000 закодированных посланий в направлении предполагаемого источника. Ответа земляне так и не дождались.
Феномен левшей (физиология)
Над объяснением существования на Земле левшей и правшей ученые бьются уже не одно столетие, однако развитие науки постоянно опровергает даже признанные до этого теории. Так, ещё в 1860-х годах французский хирург Поль Брока установил взаимосвязь между работой полушарий мозга и активностью рук, сказав, что полушария мозга и половины тела связаны друг с другом крест-накрест. Однако современные ученые такую простую взаимосвязь опровергают. Ещё в 1970-е годы было доказано, что часть левшей имеет такую же левополушарную ориентацию, как и правши.
Попытались внести свою лепту в объяснение феномена леворукости и генетики. Ученые из университетов Оксфорда, Сент-Эндрюс, Бристоль и Института Макса Планка в голландском городе Неймеген установили, что доминирование одной из рук связано с группой генов и закладывается уже на этапе эмбрионального развития. Изучение генома привело к находке: больше других на искомый феномен влияет ген PCSK6.
Определение ориентации зависит от количества мутаций, произошедших в аллелях, но если доминантной чертой является праворукость, почему леворукость не исчезла из генетической копилки?
Сегодня ученые считают, что «главенство» одной из рук является не просто «доминантным» или «рецессивным», а более тонким, своего рода неуловимым признаком. Однозначного объяснения феномену левшей ученые так и не могут дать.
Гомеопатия (медицина)
Создателем гомеопатии считается Самуэль Ганеман , который в 1791 году провел на себе опыт с разными дозами хинина и увидел, что одно и то же вещество в различных пропорциях может как лечить, так и калечить.
Основной принцип гомеопатии, принцип сверхмалых доз, сегодняшней медициной воспринимается с большим скептицизмом. Вещество в гомеопатии разводится в таких пропорциях, что в конечном составе, по числу Авагадро, не остается ни одной молекулы изначального вещества.
Сами гомеопаты не ищут сложных ответов и объясняют воздействие своих препаратов «памятью воды», хотя не понятно, почему вода должна «помнить» именно изначальное вещество, а не тысячи других примесей и химических элементов, носимых в воздухе или бывших когда-то в водопроводе (представим на секунду «чистейший» водопровод начала XIX века).
Проводимые в 2005 году доктором Коуэном опыты показали, что молекулы воды действительно могут образовывать молекулярную метаструктуру, но сохраняется она намного меньше секунды. Однако гомеопатию не списывают со счетов, поскольку и сегодня регистрируется масса случаев, когда после лечения гомеопатическими средствами люди поправлялись. Врачи объясняют это эффектом плацебо.
Равновесие велосипеда (механика)
Почему велосипед не падает? Казалось бы, ничего сложного. Во-первых - эффект кастора (подруливание переднего колеса в сторону отклонения велосипеда от оси), во-вторых - гироскопический эффект вращений колес.
Однако американскому инженеру Энди Руина удалось создать велосипед, в котором переднее колесо опирается в землю перед точкой пересечения с ней оси, что нивелирует эффект кастора. Передние и задние колеса «велосипеда Руина» связаны с ещё двумя, вращающимися в обратную сторону, это убирает гироскопический эффект.
При всем при этом велосипед теряет равновесие не быстрее, чем простой велик. Отсюда вывод: оба эффекта, и кастора, и гироскопа играют важную роль в уравновешивании баланса снаряда, но не являются определяющими.
Почему же все-таки не падает велосипед?